ANSYS�{�ģ�M�c��ͨ������ϵ�y
|
 |
Ӌ����λ����
�� �� �ʣ� 0
�����£�2020-02-25
�P ע �ȣ�3146
���a��I��������l�Ƽ��ɷ�����˾
|
|
|
 �c��Iϵ�rՈ��֪ԓ��Ϣ���Խ����b��W�� �c��Iϵ�rՈ��֪ԓ��Ϣ���Խ����b��W�� |
|
|
�aƷԔ����BANSYS�{�ģ�M�c��ͨ������ϵ�y
1.ϵ�y����
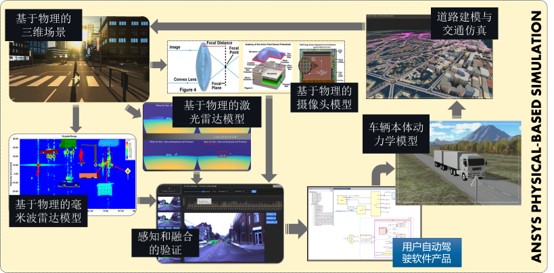
ANSYS�{�ģ�M�c��ͨ������ƽ�_�ṩ�˻������������S������ģ�������Z�x�ĵ�·�¼���ģ������������W���ԵĔz���^�ͼ������_�ķ��桢��������늴ŌW���Եĺ��ײ����_�ķ��棬�Ķ����F�����������ཻͨ������������h���Č��r�]�h���档����Ҫ�������£�
1)�_��ʽ��ͨ������ģ�K���Զ��x�O����·�ͽ�ͨ�����������Զ��x�O����·���ԵĽ�����G�����ȵȣ�
2)���Ը����Ñ������Զ��x�O����·�����ϵĽ�ͨ���������Զ��x�O����·�ρ�����܇�v�����˺ͽ�ָͨʾ����
3)���Ը����͑����������O�������{���㷨����܇�v����܇�v�����W������
4)֧�ָ߾��ȵ����S��������ͻ��ڭh�����ģ�M��
5)֧�ָ߾��ȵ�������ԵĂ��������棬�������ײ����_�ķ��桢�z���^�ķ���ͼ������_�ķ��棻
6)���⣬���]���ܸ��ӱ���ط�ӳ���ˡ�܇��·���ڭh����yԇ��ԓƽ�_߀�ṩ���_�ŵĽӿڣ������c�����������VR�O�䡢����������yԇ�����M�Пo�p���룬�Ķ����õĝM�㲻ͬ���e����ͬĿ�˵Ĝyԇ����Ҫ��
2.ϵ�y����
����քe��B��ƽ�_��ģ�K�Ę��ɡ�
2.1.�Զ��x��·�h��
ANSYS�{�ģ�M�c��ͨ������ƽ�_�ṩ��һ���Զ��x��·�������OӋ���ߣ��߂�ֱ�����������������OӋ������֧�ֵ�·���ȡ��L�ȡ��돽������܇��������܇������܇�����١�܇����͵ȵľ���
ͬ�r��ԓ�OӋ����֧�ָܵȲ�ͬ�߶ȵ�·�Լ���ͬ�¶ȃA�ǡ���·����ڡ��ѵ��������ȵĶ��x��߀֧��܇�������Զ��x����ģ�������ξ����p����������̓����܇�����y�����ɫ��һϵ��܇������͡�ͬ�r��ܛ�������S���ĭh��ģ�͎죬���ľ���������ͨ���R��·����늾��U���G���������ʩ��·���ϵK����Oʩ����ͨ���˵Ȍ���ģ�ͣ��ɸ����Ñ�����·�����M�п��ٽ�ģ��
�����Զ��x�����⣬ANSYS�{�ģ�M�c��ͨ������ƽ�_߀֧����OpenStreetMap��3D�߾��؈D���Ԅ������c�؈Dƥ��ĵ�·ģ�͡�
2.2.�Զ��x��ͨ����
ANSYS�{�ģ�M�c��ͨ������ƽ�_߀�ṩ�˿�ݵĻ����Z�x�ĵ�·��ͨ���OӋ������܇�����Ҏ�t��܇�v�������О顢��ָͨʾ���О飬�Լ�ijһ�r�̸���ͨ����ͨ�О�ľ��_����ݔ�������⣬��ͨ������О�Ҳ�����˞鶨�x��������܇�v�{��О顢ͻȻ׃����ͻȻ���١����ˁy�J�t�������е���һϵ�Ј����ķ��棬ͬ�rܛ���Ȳ�܇�v������֮�g���Զ��x�����c���ɷ����Ԅӱ����˺ͺ�ҕ���˰l����ײ���О顣ܛ����Ƕ�_���Z�Զ��x��ͬ�rҲ֧����Python��C++���Z�ԵĽӿڿ��Ɓ����x��ͨ�О顣���D��ʾ����ͨ�^�Z�x�����_���Z�ԁ����x܇�v�����˵Ƚ�ͨ������О顣
2.3.����܇�v�����Wģ��
���������ĵ�·�����Լ���ͨ���Ĵ����֮�⣬ANSYS�{�ģ�M�c��ͨ������ƽ�_ͬ���ṩ�˻��ڿ������Ե�܇�v�����Wģ�ͣ����ṩ���������܅��������ã�
�ױP���������L���ߡ��S�g�ࡢ�����ȣ�
���܅����������r�١������D�ٵȣ�
�D����
݆ݞ������
����
ͬ�r��ܛ��߀�ṩ�˸�����ԅ������A���x�����������Ñ������x܇�v�������M�п��ٵĜyԇ��C�����P�Č����У�
�������Ԍ�����
�x܇���Ԍ�����
�D�����Ԍ�����
����P���Ԍ�����
���L������
�ϵK����D��������
����
ANSYS�{�ģ�M�c��ͨ������ƽ�_߀֧���ⲿ܇�v�����Wģ�͵Č���ͼ��ɣ���CarSim܇�v�����Wģ�ͣ��Լ��Ñ����е�܇�v�����Wģ�͡�
2.4.���������挍�����S������ģ
�ڟo��܇�v�����������У�����ǰ���P�ڵ�·��������ͨ���Լ�܇�v�����Wģ�͵Ľ�ģ�����⣬ANSYS�{�ģ�M�c��ͨ������ƽ�_��������c�̓��������ṩ���������挍�����S������ģ��ray-tracing�ĈD���㷨��ʹ�������Ĉ����Ę����c�����挍�_��һ����ƥ��ȣ��Դˌ��o��܇�Ђ������ĸ�֪�ͺ��ڿ����㷨����C�ṩ�˺ܺõĜʴ_�Ժ��挍�ԣ��Ԝp�و������ȱ���������Ă�������֪�㷨�ěQ���e�`��
���������������挍�Ľ�ģƽ�_��У�ANSYS�{�ģ�M�c��ͨ������ƽ�_��ͨ�^�����������挍�����Ķ��x�ͻ���ray-tracing�ĈD���㷨�����C����Ĝʴ_�Ժ��挍�ԣ�
�h����Դ�Ķ��x��������
��յ��ն�ֵ��
���ڽ����ȵ�̫ꖹ���նȺ�λ�ö��x��
�h�������и��N�c��Դ�Լ����Դ�Ķ��x�����V+IES+XMP����
܇�v����ϵ�y�Ĺ�Դ���x�����V+IES+XMP����
�h�������а�����·��������܇����һϵ�в��ϱ����W���ԵĶ��x��
���и�����Դ�Ķ��xͨ�^�������P���x�ļ�
��ǰ�����v�����ϱ����W����ͨ�^ANSYS�_�l��һ��OMS����������W����BRDF�y���xӲ���O�䣬���Ñ��������Ĉ������ώ��M��̽�y������̽�y���ò��ϱ����W����BSDF��������ǰ��������ģ�����ٲ��|���棬�Ķ���ray-tracing�ĈD���㷨�·���õ�һ���������Ŀ��]�ⲿ�h�����Լ����w�����W���Ե������挍�����S������ģ��ͬ�rANSYS�{�ģ�M�c��ͨ������ƽ�_߀�ṩ�S���IJ��ώ칩�͑������ģʹ�á�
2.6.���r�]�h����ϵ�y
��ǰ��ͨ�^���h������������ͨ���Ľ�ģ������o��܇�v���\�Ј�����܉�E��ͬ�r�����z���^���������_�ͺ��ײ����_�ĸ�֪ϵ�y�ķ��棬ͨ�^�_�ŵ�API�ӿڣ����Է�����M���ⲿ�Ԅ��{��㷨�ļ��ɡ��Ķ��γɌ��r�]�h���{�ϵ�y���档
2.7.���������������^����������ϵ�y
�S�������{��o��ϵ�y��ADAS������u�ռ����ИI�lչ��܇�v���ܻ��^������ϵ�yҲ��u�ɞ鮔ǰ�ИI�İlչڅ�ݺ͑��ß��c��ANSYS�Ԅ��{����ƽ�_Headlampģ�Kͨ�^ANSYS���е��������������棬��͑��ṩ�挍��܇�v�^��·����ͷֲ��yԇ�̈́ӑB�{��c�����^������yԇ��
����ǰ�������S�h����ģ��ͨ�^ANSYS OMS�O���M�в��ϱ����W���ԵIJɼ��c�xֵ�⣬���˱��C�ӽ��挍������������ͣ�Headlampģ�Kͬ�ӌ���Դ�M�з���ģ�M������܇����Դ����Ȼ���Դ��·����Դ�ȡ����x��ʽ�����磺
��Դ�⏊�ֲ�IES�ļ���
��Դ���Vspectrum�ļ���
��Դ���ȵȣ�
�քe�鲻ͬ��Դ�Ĺ��V�ֲ���܇����Դ��IES���x�ļ���
���ڭh����Դ���������棬���Ԍ��F܇�vǰ�՟��h�⣬���⣬�ȟ����ГQ�Լ��⏊�Č��r�ГQ���ƣ�ͬ�r�S���Ĺ�ȌW�������ߣ�����ɫ�ȌW����ȌW�����նȾ������նȅ^�����Ϣ���ڷ�����ֲ���r��֧�ֵ�25��Ŀ�ˉ���ֲ���Ϣ���ڷ�����C�^����ֲ��Ƿ���Ϙ˜ʡ�
�����o�B���ͷֲ���C��ANSYS Headlamp�_�ŵ���C++��SCADE��Simulink�Ĺ��͔����ӿ�֧�ֿ͑��Զ��x���������^���_�l�c��C��ͬ�r�S���ĄӑB�{�ģ�M�͈�������Ҳ���Ԏ����͑F���r�ĄӑB�{��^����C����AFS��ADB������^���������^�����ǻ��^���ķ����c�yԇ��C������IIHS�ӑB�^���yԇ�˜ʵ�ҹ�g�yԇ��C��
|
|
| ���T���e�����M���T |
| ����r�g��2007-05-25
|
|

|